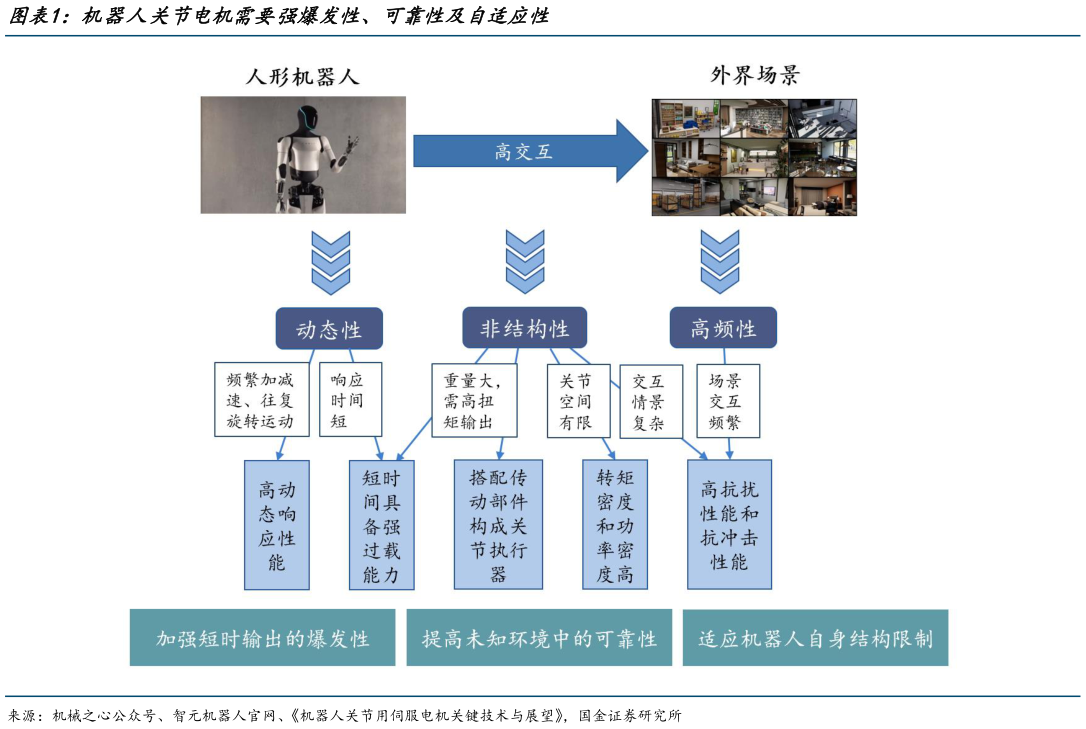
> 数据图表想关注一下机器人关节电机需要强爆发性、可靠性及自适应性2025-8-6机器人通过与外界场景进行交互来完成各项任务,而外界场景具有动态性和非结构性,交互具有频繁性,这对机器人执行器提出了严格要求。从机器人的需求角度分析,电机具有如下特征:(1)模块化设计:通过电机与传动部件集成,实现低速大转矩输出,以应对重载交互需求(2)强过载能力:在动态场景中快速响应时效性任务,需支持短时高力矩爆发输出(3)优异动态响应:适应频繁加减速及往复运动,确保复杂动作执行的精准性(4)高可靠性能:抵御频繁交互带来的冲击扰动,保障系统运行可靠性(5)高功率转矩密度:在有限关节空间内实现高转矩功率密度,可满足机器人轻量化需求。我们认为相较于传统工业应用中的伺服电机,机器人电机更需加强短时输出的爆发性、提高未知环境中的可靠性,并适应机器人自身结构所带来的限制。国金证券科技传媒