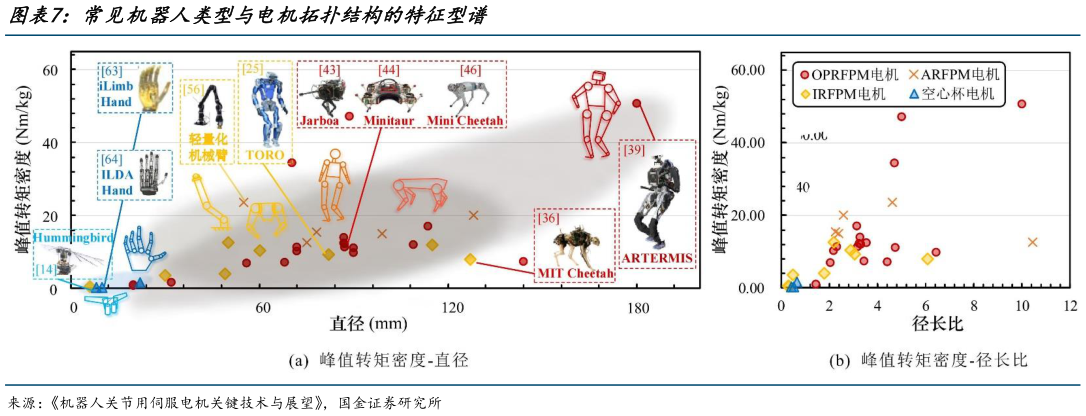
> 数据图表如何看待常见机器人类型与电机拓扑结构的特征型谱2025-8-6通过分析机器人电机的峰值转矩密度与尺寸参数关系,可建立典型应用型谱:空心杯电机适用于 8-20mm 直径的低径长比微型关节,主要应用于灵巧手等精密部件内转子电机主导 30-80mm 直径的中径长比关节,主要应用于机械臂等上肢系统外转子电机则适配 100-180mm 直径的高径长比关节,适合腿足式机器人等高动态下肢需求。轴向磁通电机具有高转矩密度特性,但由于其存在散热问题,当前实际应用有限。国金证券科技传媒