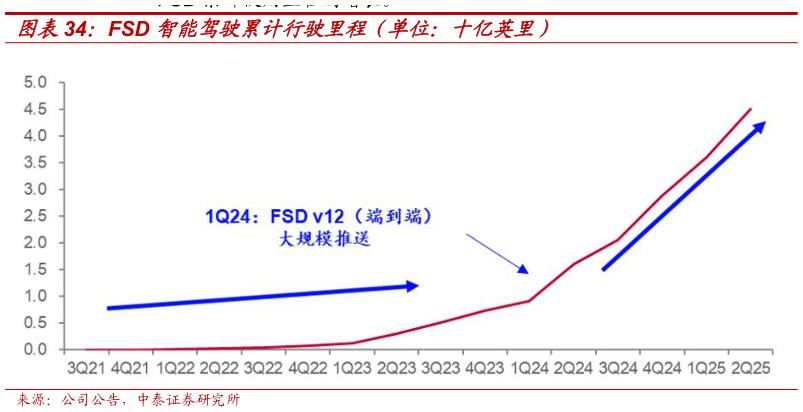
> 数据图表咨询下各位FSD 智能驾驶累计行驶里程(单位:十亿英里)2025-8-2 端到端大模型不再进行模块和任务的划分,将加强智驾的“类人”驾驶体验感随着模型融合,整个智驾系统或将演变成一个大模块(各模块逐步融合并被大规模神经网络模型取代)。端到端系统接收到传感器的输入数据后,直接输出驾驶决策(动作或轨迹)。相较传统模块化架构(感知预测规控等子模型嵌套协同),端到端大模型通过更简洁的系统架构,基于数据驱动进行全局任务优化,能够避免信息损耗计算延迟误差累积等,利于优化长尾问题、解决智驾方案机器操控感较强的用户痛点。 随着 FSD 由规则代码范式转为端到端范式,其驾乘体验的“类人感”提升,好的体验累计行驶里程增长加速以 FSD v12(转为端到端后的第一个版本)大规模推送的时间点(1Q24)为分界线。在此之前,从 FSD 首次推送的 4Q20 计算,3.5 年时间内使用 FSD 的行驶里程仅累计约 10 亿英里FSD v12(端到端)推送后,仅 2Q24-2Q25 的 5 个季度内,使用 FSD 的行驶里程就累计增加约 36 亿英里。端到端范式带来的驾驶感受提升加快了FSD 累计使用里程的增长。中泰证券综合其他