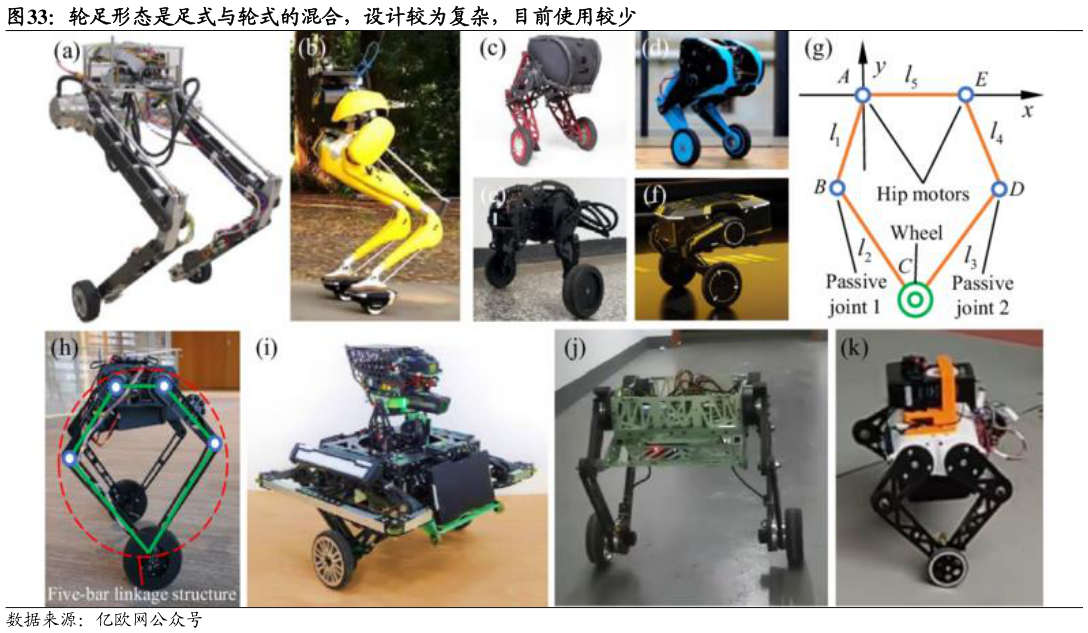
> 数据图表咨询大家轮足形态是足式与轮式的混合,设计较为复杂,目前使用较少2025-8-2轮足形态是足式与轮式的混合,设计较为复杂,目前使用较少。轮足结合的设计意味着该机器人需要更加复杂的至少三套控制系统两轮动平衡控制、腿部仿生跳跃控制和轮腿一体化全身控制。另一种轮足式的设计则是将双足机器人安装在一个单独的移动底盘上,在遇到障碍时再使用双足进行跨越。国泰海通综合其他