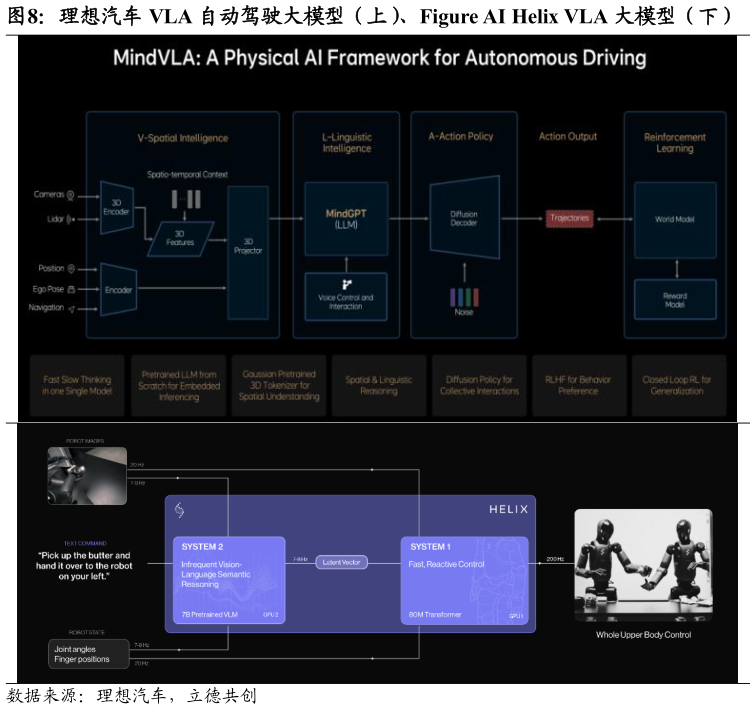
> 数据图表我想了解一下理想汽车 VLA 自动驾驶大模型(上)、Figure AI Helix VLA 大模型(下)2025-8-3人形机器人与自动驾驶算法路径趋同,从规则驱动转向数据驱动,最终向知识驱动 VLA 大模型演进。2024 年 Waymo EMMA 首次将多模态大语言模型引入自动驾驶领域,开创 VLA 架构先河小米 ORION 通过 QT-Former 解决长时序记忆问题,理想 Mind VLA 深度融合 3D 空间理解与扩散模型轨迹生成,标志着知识驱动范式的进一步发展。当前 VLA 模型呈现三大特性:多模态融合(3DGS 技术与语言模型结合)、计算效率优化(MOE 架构、模型量化)、仿真闭环构建(世界模型强化学习)。差异则体现在场景复杂度:汽车仅需处理 2-3 个自由度,而人形机器人需协调数十个自由度,数据闭环构建难度更大。国泰海通综合其他