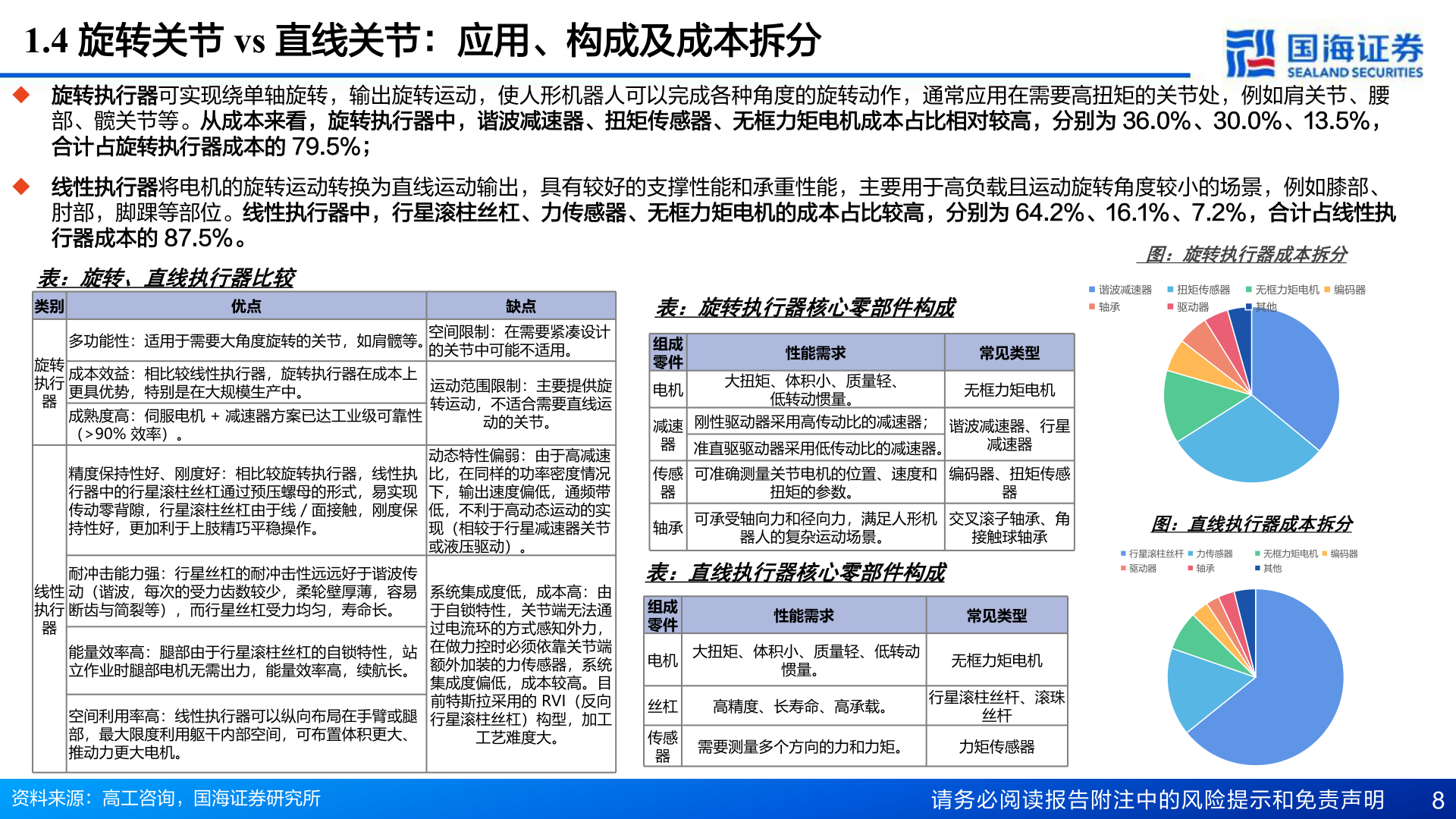
> 数据图表想问下各位网友1.4 旋转关节 vs 直线关节:应用、构成及成本拆分2025-9-01.4 旋转关节 vs 直线关节:应用、构成及成本拆分u 旋转执行器可实现绕单轴旋转,输出旋转运动,使人形机器人可以完成各种角度的旋转动作,通常应用在需要高扭矩的关节处,例如肩关节、腰部、髋关节等。从成本来看,旋转执行器中,谐波减速器、扭矩传感器、无框力矩电机成本占比相对较高,分别为 36.0%、30.0%、13.5%,合计占旋转执行器成本的 79.5%;u 线性执行器将电机的旋转运动转换为直线运动输出,具有较好的支撑性能和承重性能,主要用于高负载且运动旋转角度较小的场景,例如膝部、肘部,脚踝等部位。线性执行器中,行星滚柱丝杠、力传感器、无框力矩电机的成本占比较高,分别为 64.2%、16.1%、7.2%,合计占线性执行器成本的 87.5%。图:旋转执行器成本拆分表:旋转、直线执行器比较类别优点缺点表:旋转执行器核心零部件构成谐波减速器轴承扭矩传感器驱动器无框力矩电机 编码器其他旋转执行器线性执行器多功能性:适用于需要大角度旋转的关节,如肩髋等。空间限制:在需要紧凑设计成本效益:相比较线性执行器,旋转执行器在成本上更具优势,特别是在大规模生产中。成熟度高:伺服电机 + 减速器方案已达工业级可靠性(>90% 效率)。运动范围限制:主要提供旋转运动,不适合需要直线运的关节中可能不适用。动的关节。精度保持性好、刚度好:相比较旋转执行器,线性执行器中的行星滚柱丝杠通过预压螺母的形式,易实现传动零背隙,行星滚柱丝杠由于线 / 面接触,刚度保持性好,更加利于上肢精巧平稳操作。耐冲击能力强:行星丝杠的耐冲击性远远好于谐波传动(谐波,每次的受力齿数较少,柔轮壁厚薄,容易断齿与简裂等),而行星丝杠受力均匀,寿命长。能量效率高:腿部由于行星滚柱丝杠的自锁特性,站立作业时腿部电机无需出力,能量效率高,续航长。空间利用率高:线性执行器可以纵向布局在手臂或腿部,最大限度利用躯干内部空间,可布置体积更大、推动力更大电机。动态特性偏弱:由于高减速比,在同样的功率密度情况下,输出速度偏低,通频带低,不利于高动态运动的实现(相较于行星减速器关节或液压驱动)。系统集成度低,成本高:由于自锁特性,关节端无法通过电流环的方式感知外力,在做力控时必须依靠关节端额外加装的力传感器,系统集成度偏低,成本较高。目前特斯拉采用的 RVI(反向行星滚柱丝杠)构型,加工工艺难度大。组成零件电机性能需求大扭矩、体积小、质量轻、低转动惯量。常见类型无框力矩电机刚性驱动器采用高传动比的减速器; 谐波减速器、行星减速器准直驱驱动器采用低传动比的减速器。减速器可准确测量关节电机的位置、速度和传感器轴承 可承受轴向力和径向力,满足人形机扭矩的参数。器人的复杂运动场景。编码器、扭矩传感器交叉滚子轴承、角接触球轴承表:直线执行器核心零部件构成图:直线执行器成本拆分行星滚柱丝杆 力传感器驱动器轴承无框力矩电机 编码器其他组成零件电机 大扭矩、体积小、质量轻、低转动性能需求惯量。常见类型无框力矩电机丝杠高精度、长寿命、高承载。传感器 需要测量多个方向的力和力矩。行星滚柱丝杆、滚珠丝杆力矩传感器资料来源:高工咨询,国海证券研究所请务必阅读报告附注中的风险提示和免责声明8国海证券综合其他