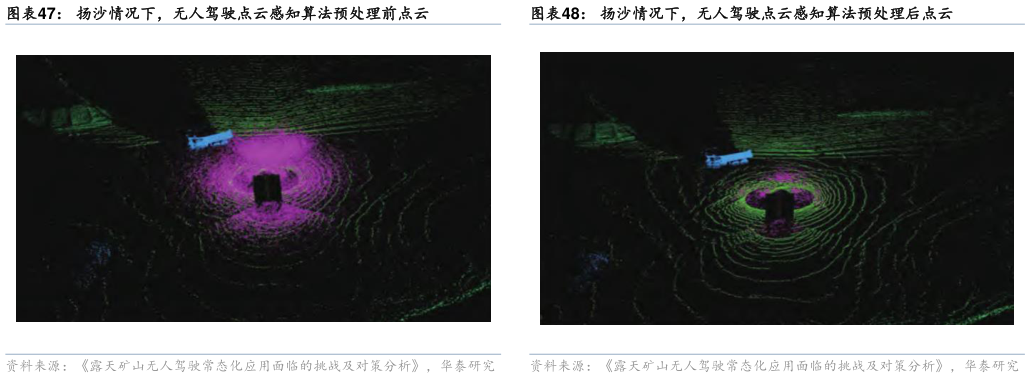
> 数据图表咨询大家扬沙情况下,无人驾驶点云感知算法预处理前点云扬沙情况下,无人驾驶点云感知算法预处理后点云2025-9-4露天矿山环境极端,感知难点在于多源数据的处理及融合。露天矿山有较多极寒高温天气、扬沙粉尘、雨雪天气以及路面湿滑等极端环境,同时矿区多为随生产动态变化的非标准化土路,对感知设备输出数据的质量有较大影响。易控智驾“BEVTransformerOCC”多模态感知方案在矿卡上安装多个激光雷达、毫米波雷达、摄像头等传感器以获得多源数据,采用鸟瞰视角,通过 Transformer 模型进行特征融合,最后使用 OCC 进行三维空间占据状态建模,使得方案具备更强的准确性和鲁棒性,可实现对交通参与者与环境进行准确识别,对雨、雾、雪、煤灰、扬尘等恶劣环境达到强适应,减少因感知误检引起的刹停、减速等问题,保障无人驾驶车辆全天候高效作业。华泰证券能源矿产