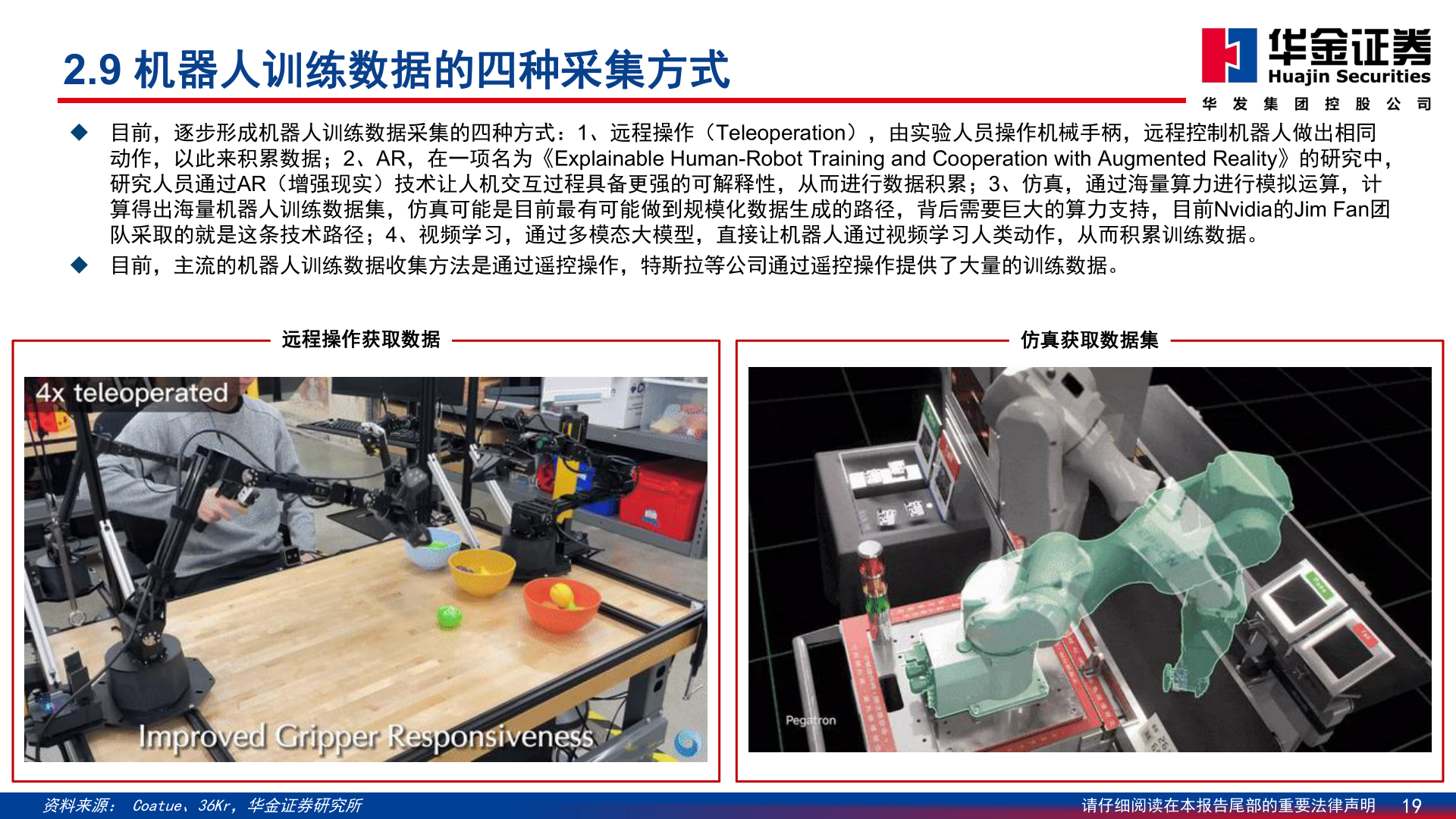
2.9 机器人训练数据的四种采集方式u 目前,逐步形成机器人训练数据采集的四种方式:1、远程操作(Teleoperation),由实验人员操作机械手柄,远程控制机器人做出相同动作,以此来积累数据;2、AR,在一项名为《Explainable Human-Robot Training and Cooperation with Augmented Reality》的研究中,研究人员通过AR(增强现实)技术让人机交互过程具备更强的可解释性,从而进行数据积累;3、仿真,通过海量算力进行模拟运算,计算得出海量机器人训练数据集,仿真可能是目前最有可能做到规模化数据生成的路径,背后需要巨大的算力支持,目前Nvidia的Jim Fan团队采取的就是这条技术路径;4、视频学习,通过多模态大模型,直接让机器人通过视频学习人类动作,从而积累训练数据。u 目前,主流的机器人训练数据收集方法是通过遥控操作,特斯拉等公司通过遥控操作提供了大量的训练数据。远程操作获取数据仿真获取数据集资料来源: Coatue、36Kr,华金证券研究所请仔细阅读在本报告尾部的重要法律声明19