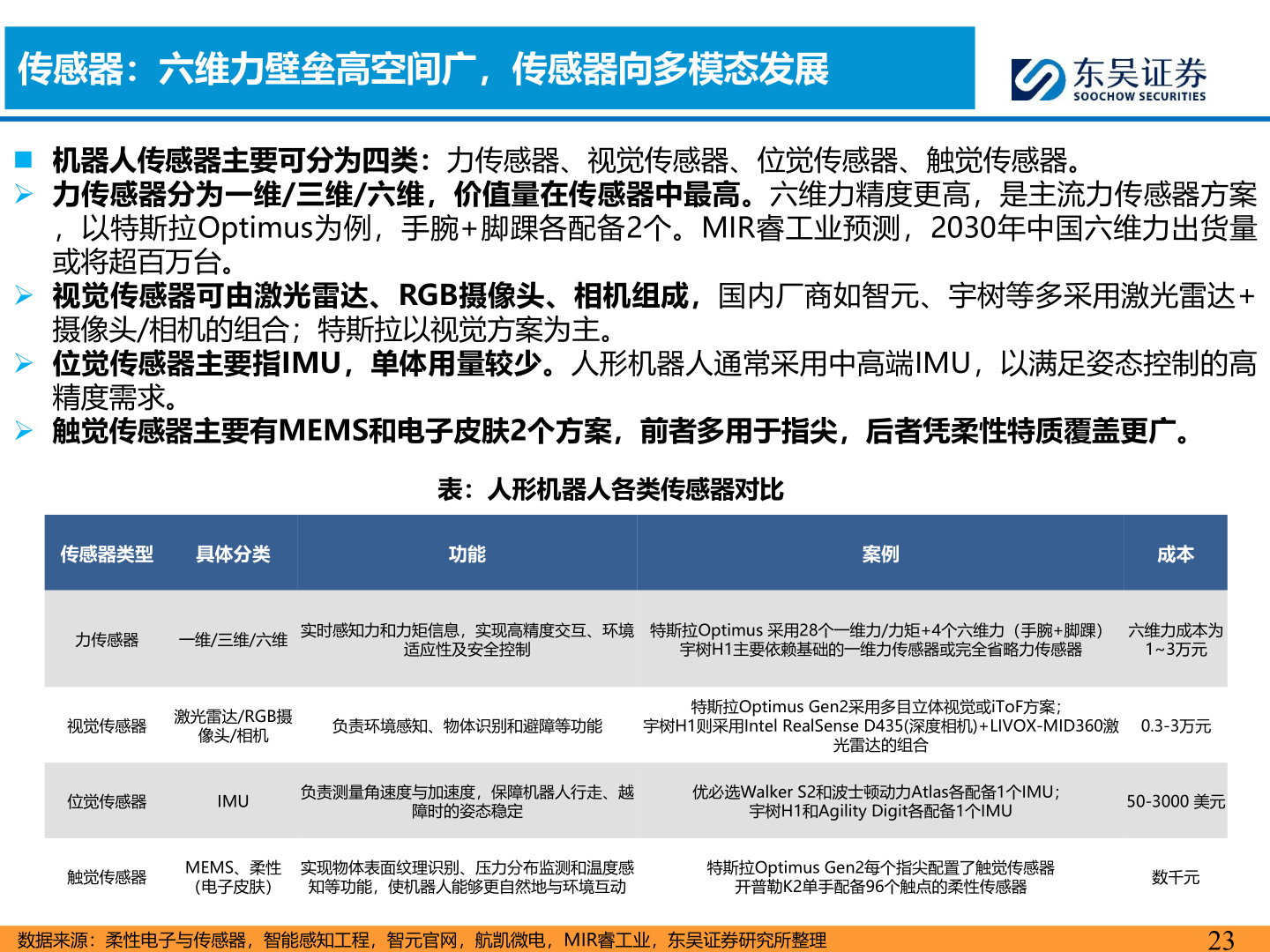
> 数据图表如何了解传感器:六维力壁垒高空间广,传感器向多模态发展2025-12-2传感器:六维力壁垒高空间广,传感器向多模态发展◼ 机器人传感器主要可分为四类:力传感器、视觉传感器、位觉传感器、触觉传感器。➢ 力传感器分为一维/三维/六维,价值量在传感器中最高。六维力精度更高,是主流力传感器方案,以特斯拉Optimus为例,手腕+脚踝各配备2个。MIR睿工业预测,2030年中国六维力出货量或将超百万台。➢ 视觉传感器可由激光雷达、RGB摄像头、相机组成,国内厂商如智元、宇树等多采用激光雷达+摄像头/相机的组合;特斯拉以视觉方案为主。➢ 位觉传感器主要指IMU,单体用量较少。人形机器人通常采用中高端IMU,以满足姿态控制的高精度需求。➢ 触觉传感器主要有MEMS和电子皮肤2个方案,前者多用于指尖,后者凭柔性特质覆盖更广。表:人形机器人各类传感器对比传感器类型具体分类功能案例成本力传感器一维/三维/六维实时感知力和力矩信息,实现高精度交互、环境特斯拉Optimus 采用28个一维力/力矩+4个六维力(手腕+脚踝)六维力成本为适应性及安全控制宇树H1主要依赖基础的一维力传感器或完全省略力传感器1~3万元视觉传感器激光雷达/RGB摄像头/相机负责环境感知、物体识别和避障等功能宇树H1则采用Intel RealSense D435(深度相机)+LIVOX-MID360激0.3-3万元特斯拉Optimus Gen2采用多目立体视觉或iToF方案;光雷达的组合位觉传感器IMU负责测量角速度与加速度,保障机器人行走、越优必选Walker S2和波士顿动力Atlas各配备1个IMU;障时的姿态稳定宇树H1和Agility Digit各配备1个IMU50-3000 美元触觉传感器MEMS、柔性(电子皮肤)实现物体表面纹理识别、压力分布监测和温度感知等功能,使机器人能够更自然地与环境互动特斯拉Optimus Gen2每个指尖配置了触觉传感器开普勒K2单手配备96个触点的柔性传感器数千元数据来源:柔性电子与传感器,智能感知工程,智元官网,航凯微电,MIR睿工业,东吴证券研究所整理23东吴证券科技传媒