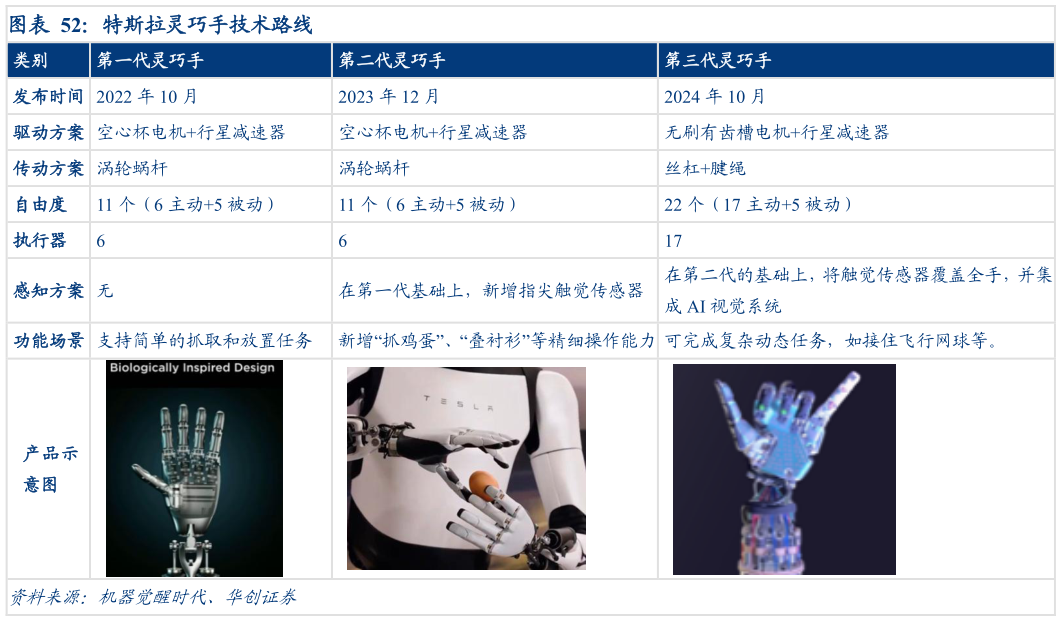
> 数据图表想问下各位网友特斯拉灵巧手技术路线2025-12-1灵巧手作为人形机器人拓宽应用场景的关键部件,2026 年有望加速产业化落地。灵巧手约占机器人成本 14%,以传动路径区分当前主流技术包括腱绳传动方案(特斯拉 Optimus)、齿轮传动方案(宇树 Dex5-1)等,由于作为仿人手设计,需要向高自由度及高精度方向发展,来逐步拓展人形机器人的应用功能,建议重点关注 2026 年技术及产品突破情况。以特斯拉方案举例,第一代灵巧手自由度仅 11 个,内置 6 个空心杯电机,第二代灵巧手小幅升级,在第一代基础上增加了触觉传感器,使机器人能够完成部分高精度操作。而Gen2.5 灵巧手单手自由度大幅提升至 22 个,并且传动方案采用微型减速器丝杠腱绳的复合传动方式,并使用了无刷有齿槽电机技术,其对外界的物理感知能力进一步提升,可以完成更精细动态抓取和复杂操作任务。随着灵巧手自由度的提升,其操控难度也进一步加大,马斯克计划 Optimus gen3 的灵巧手执行器系统将从 gen2.5 版本的 17 个提升到 50 个,复杂度增加近 200%,灵巧手 26 年方案定型将进一步推动人形机器人行业发展进程。华创证券综合其他