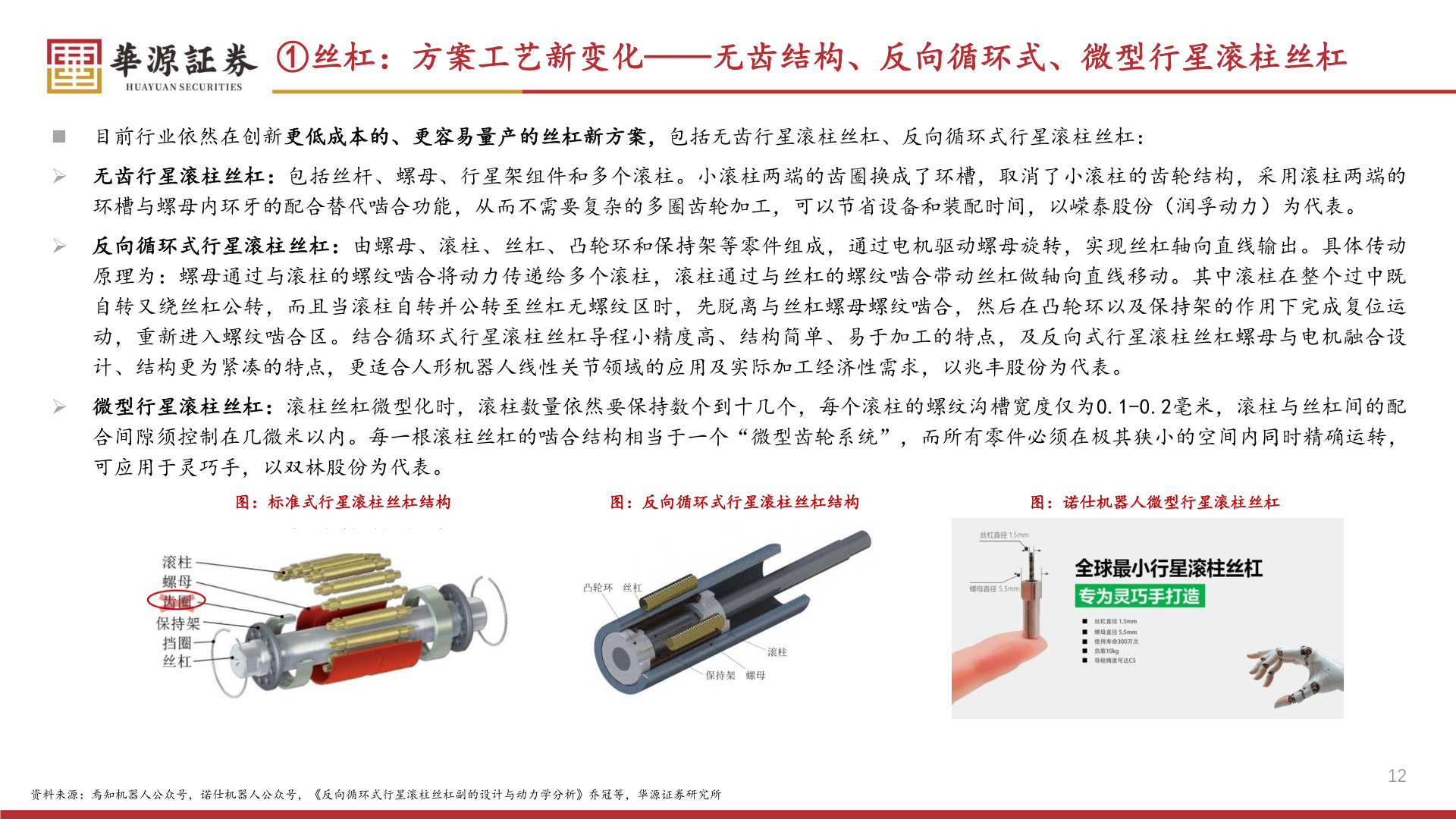
> 数据图表一起讨论下①丝杠:方案工艺新变化——无齿结构、反向循环式、微型行星滚柱丝杠2025-12-6①丝杠:方案工艺新变化——无齿结构、反向循环式、微型行星滚柱丝杠n 目前行业依然在创新更低成本的、更容易量产的丝杠新方案,包括无齿行星滚柱丝杠、反向循环式行星滚柱丝杠:Ø 无齿行星滚柱丝杠:包括丝杆、螺母、行星架组件和多个滚柱。小滚柱两端的齿圈换成了环槽,取消了小滚柱的齿轮结构,采用滚柱两端的环槽与螺母内环牙的配合替代啮合功能,从而不需要复杂的多圈齿轮加工,可以节省设备和装配时间,以嵘泰股份(润孚动力)为代表。Ø 反向循环式行星滚柱丝杠:由螺母、滚柱、丝杠、凸轮环和保持架等零件组成,通过电机驱动螺母旋转,实现丝杠轴向直线输出。具体传动原理为:螺母通过与滚柱的螺纹啮合将动力传递给多个滚柱,滚柱通过与丝杠的螺纹啮合带动丝杠做轴向直线移动。其中滚柱在整个过中既自转又绕丝杠公转,而且当滚柱自转并公转至丝杠无螺纹区时,先脱离与丝杠螺母螺纹啮合,然后在凸轮环以及保持架的作用下完成复位运动,重新进入螺纹啮合区。结合循环式行星滚柱丝杠导程小精度高、结构简单、易于加工的特点,及反向式行星滚柱丝杠螺母与电机融合设计、结构更为紧凑的特点,更适合人形机器人线性关节领域的应用及实际加工经济性需求,以兆丰股份为代表。Ø 微型行星滚柱丝杠:滚柱丝杠微型化时,滚柱数量依然要保持数个到十几个,每个滚柱的螺纹沟槽宽度仅为0.1-0.2毫米,滚柱与丝杠间的配合间隙须控制在几微米以内。每一根滚柱丝杠的啮合结构相当于一个“微型齿轮系统”,而所有零件必须在极其狭小的空间内同时精确运转,可应用于灵巧手,以双林股份为代表。图:标准式行星滚柱丝杠结构图:反向循环式行星滚柱丝杠结构图:诺仕机器人微型行星滚柱丝杠资料来源:焉知机器人公众号,诺仕机器人公众号,《反向循环式行星滚柱丝杠副的设计与动力学分析》乔冠等,华源证券研究所12华源证券综合其他