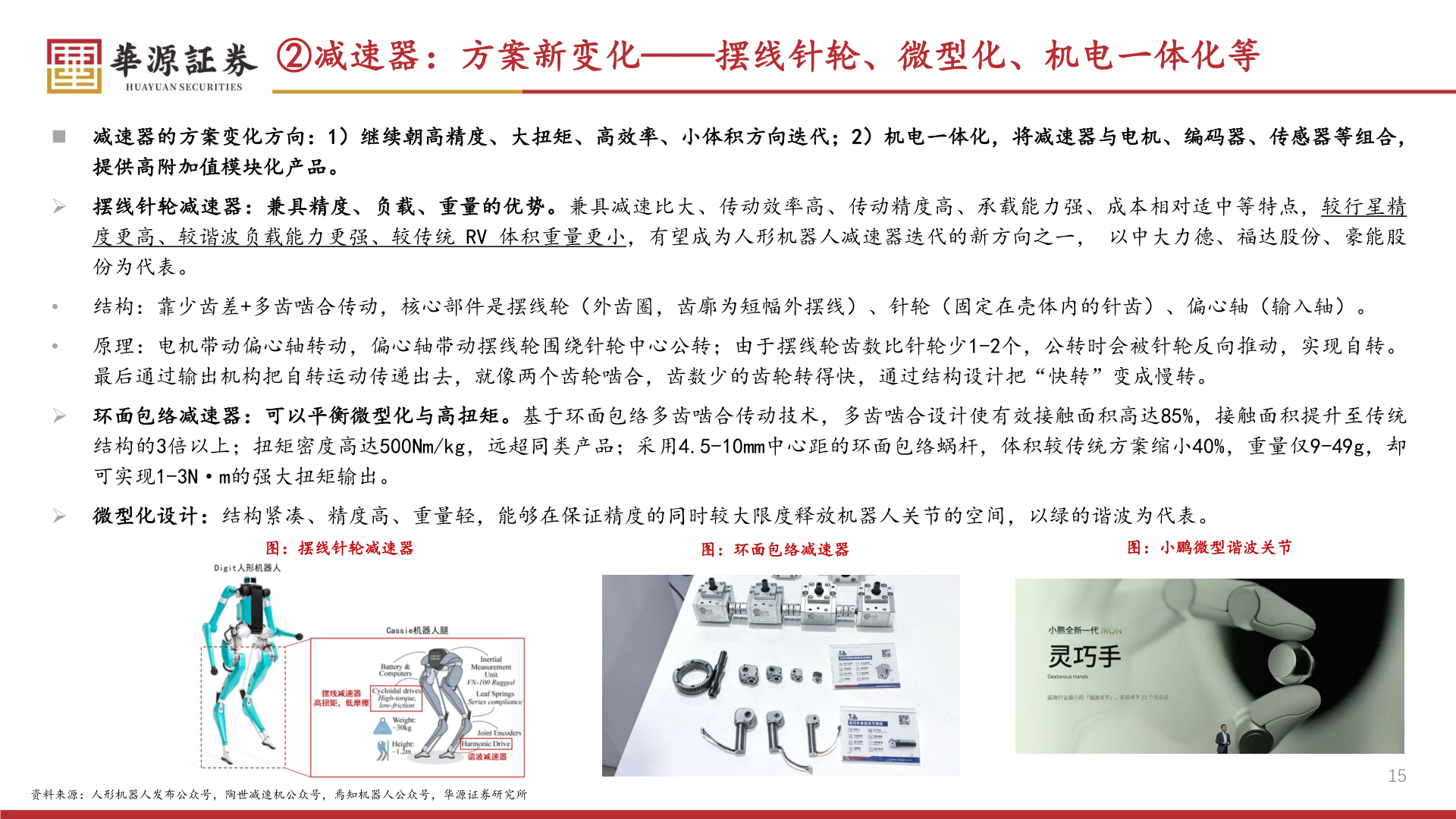
> 数据图表各位网友请教一下②减速器:方案新变化——摆线针轮、微型化、机电一体化等2025-12-6②减速器:方案新变化——摆线针轮、微型化、机电一体化等n 减速器的方案变化方向:1)继续朝高精度、大扭矩、高效率、小体积方向迭代;2)机电一体化,将减速器与电机、编码器、传感器等组合,提供高附加值模块化产品。Ø 摆线针轮减速器:兼具精度、负载、重量的优势。兼具减速比大、传动效率高、传动精度高、承载能力强、成本相对适中等特点,较行星精度更高、较谐波负载能力更强、较传统 RV 体积重量更小,有望成为人形机器人减速器迭代的新方向之一, 以中大力德、福达股份、豪能股份为代表。• 结构:靠少齿差+多齿啮合传动,核心部件是摆线轮(外齿圈,齿廓为短幅外摆线)、针轮(固定在壳体内的针齿)、偏心轴(输入轴)。• 原理:电机带动偏心轴转动,偏心轴带动摆线轮围绕针轮中心公转;由于摆线轮齿数比针轮少1-2个,公转时会被针轮反向推动,实现自转。最后通过输出机构把自转运动传递出去,就像两个齿轮啮合,齿数少的齿轮转得快,通过结构设计把“快转”变成慢转。Ø 环面包络减速器:可以平衡微型化与高扭矩。基于环面包络多齿啮合传动技术,多齿啮合设计使有效接触面积高达85%,接触面积提升至传统结构的3倍以上;扭矩密度高达500Nm/kg,远超同类产品;采用4.5-10mm中心距的环面包络蜗杆,体积较传统方案缩小40%,重量仅9-49g,却可实现1-3N·m的强大扭矩输出。Ø 微型化设计:结构紧凑、精度高、重量轻,能够在保证精度的同时较大限度释放机器人关节的空间,以绿的谐波为代表。图:摆线针轮减速器图:环面包络减速器图:小鹏微型谐波关节资料来源:人形机器人发布公众号,陶世减速机公众号,焉知机器人公众号,华源证券研究所15华源证券综合其他