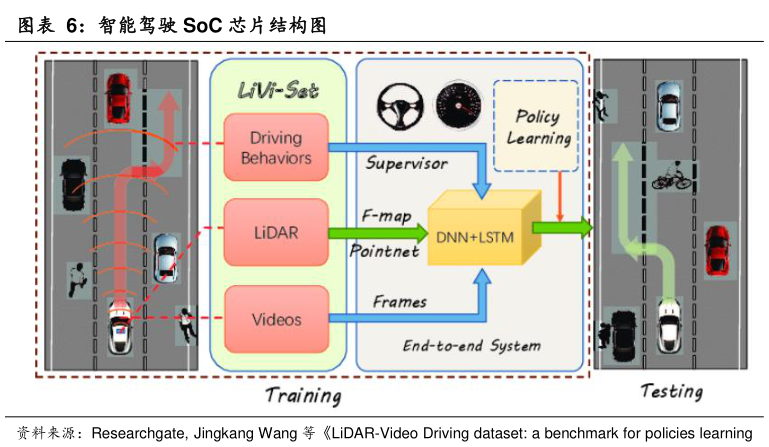
> 数据图表谁能回答智能驾驶 SoC 芯片结构图
2026-1-5端到端自动驾驶模型推高算力门槛,车载 SoC 架构加速升级。从 LiVi-Set自动驾驶策略学习框架可以看出,端到端系统 DNNLSTM 需要同时处理LiDAR 点云、视频帧等多模态数据,并结合驾驶行为监督信号完成策略学习,其运算流程显著提升了整体算力需求。这类端到端大模型不仅要求对高密度传感器数据进行实时处理,还需支撑深度神经网络与时序模型的并行推理,从而倒逼自动驾驶硬件体系中 SoC 芯片在数量与先进程度上的同步提升,一方面通过增加芯片部署分摊算力压力,另一方面通过采用更先进制程与高算力 NPU架构的车载 SoC 芯片,以更高能效承载端到端大模型的持续计算负荷,推动自动驾驶计算平台向集中化与高性能方向演进。