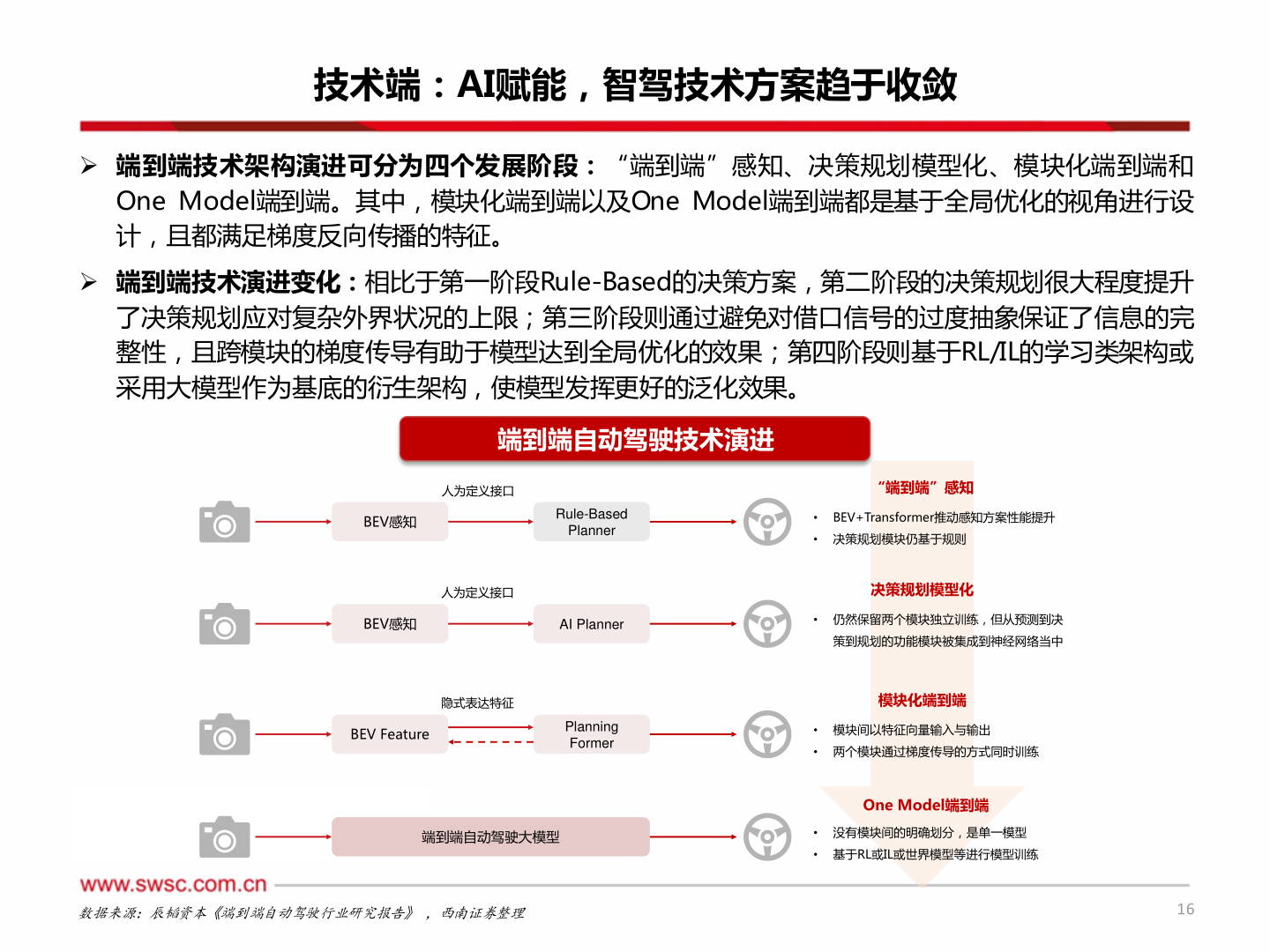
> 数据图表我想了解一下技术端:AI赋能,智驾技术方案趋于收敛2026-1-5技术端:AI赋能,智驾技术方案趋于收敛 端到端技术架构演进可分为四个发展阶段:“端到端”感知、决策规划模型化、模块化端到端和One Model端到端。其中,模块化端到端以及One Model端到端都是基于全局优化的视角进行设计,且都满足梯度反向传播的特征。 端到端技术演进变化:相比于第一阶段Rule-Based的决策方案,第二阶段的决策规划很大程度提升了决策规划应对复杂外界状况的上限;第三阶段则通过避免对借口信号的过度抽象保证了信息的完整性,且跨模块的梯度传导有助于模型达到全局优化的效果;第四阶段则基于RL/IL的学习类架构或采用大模型作为基底的衍生架构,使模型发挥更好的泛化效果。端到端自动驾驶技术演进数据来源:辰韬资本《端到端自动驾驶行业研究报告》 ,西南证券整理16人为定义接口BEV感知Rule-BasedPlanner人为定义接口BEV感知AI Planner隐式表达特征BEV FeaturePlanning Former端到端自动驾驶大模型“端到端”感知•BEV+Transformer推动感知方案性能提升• 决策规划模块仍基于规则决策规划模型化• 仍然保留两个模块独立训练,但从预测到决策到规划的功能模块被集成到神经网络当中模块化端到端• 模块间以特征向量输入与输出• 两个模块通过梯度传导的方式同时训练One Model端到端• 没有模块间的明确划分,是单一模型• 基于RL或IL或世界模型等进行模型训练西南证券公共服务