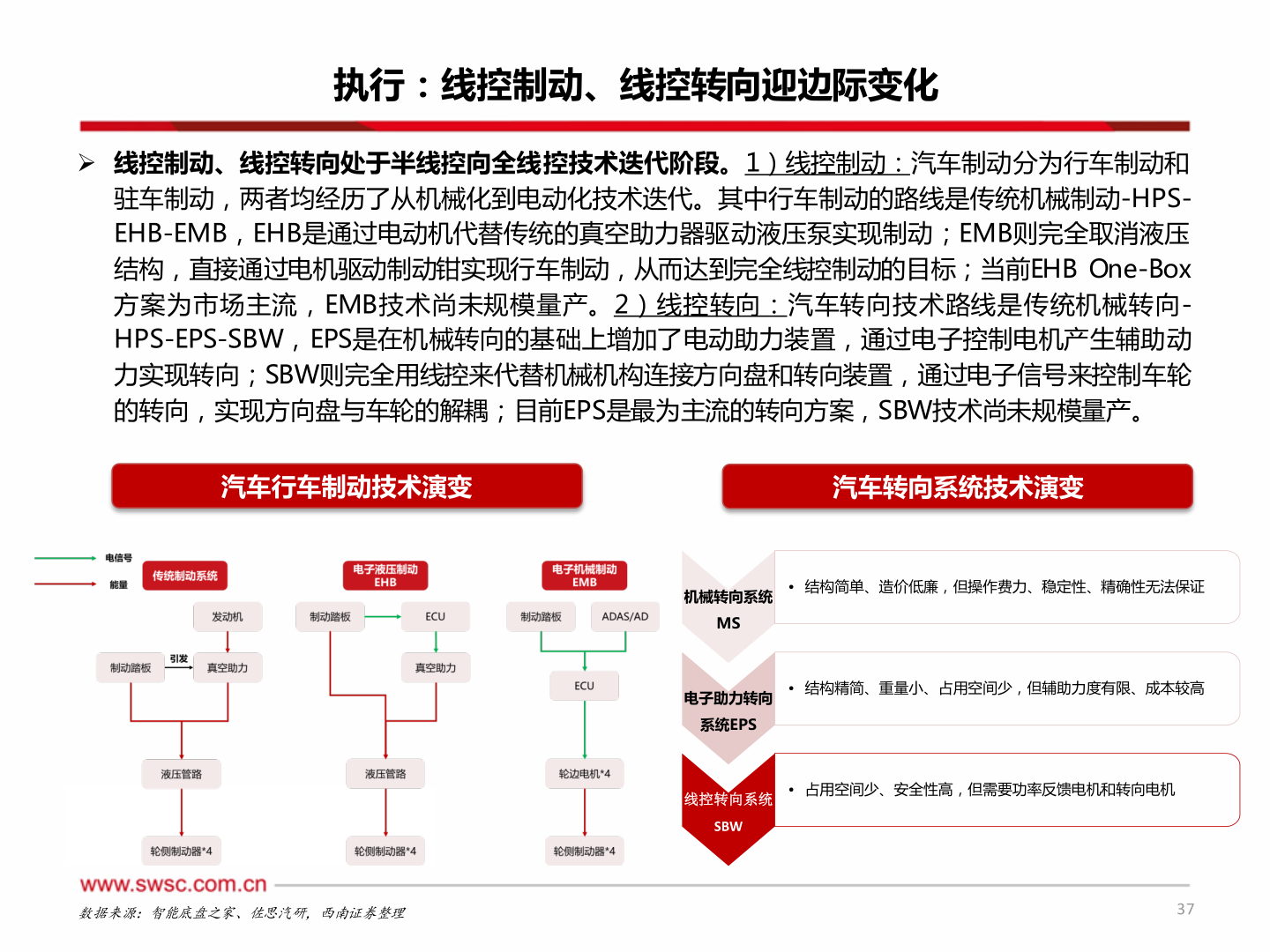
> 数据图表咨询下各位执行:线控制动、线控转向迎边际变化2026-1-5执行:线控制动、线控转向迎边际变化 线控制动、线控转向处于半线控向全线控技术迭代阶段。1)线控制动:汽车制动分为行车制动和驻车制动,两者均经历了从机械化到电动化技术迭代。其中行车制动的路线是传统机械制动-HPS-EHB-EMB,EHB是通过电动机代替传统的真空助力器驱动液压泵实现制动;EMB则完全取消液压结构,直接通过电机驱动制动钳实现行车制动,从而达到完全线控制动的目标;当前EHB One-Box方案为市场主流,EMB技术尚未规模量产。2)线控转向:汽车转向技术路线是传统机械转向-HPS-EPS-SBW,EPS是在机械转向的基础上增加了电动助力装置,通过电子控制电机产生辅助动力实现转向;SBW则完全用线控来代替机械机构连接方向盘和转向装置,通过电子信号来控制车轮的转向,实现方向盘与车轮的解耦;目前EPS是最为主流的转向方案,SBW技术尚未规模量产。汽车行车制动技术演变汽车转向系统技术演变数据来源:智能底盘之家、佐思汽研,西南证券整理37• 结构简单、造价低廉,但操作费力、稳定性、精确性无法保证• 结构精简、重量小、占用空间少,但辅助力度有限、成本较高• 占用空间少、安全性高,但需要功率反馈电机和转向电机机械转向系统MS电子助力转向系统EPS线控转向系统SBW西南证券公共服务